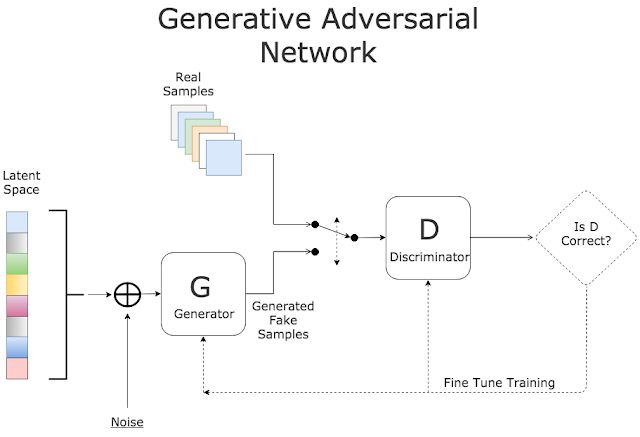
MOST Workshop on Generative Adversarial Networks and GAN Project Competition December 22-23, 2017, National Tsing Hua University 兩種模型 Discriminative model => 傳統分類問題 Generative model => 生成模型 (不只有GAN,傳統上還有 HMM…等很多生成模型) 學習的分類 Supervised learning (傳統的定義) Unsupervised learning (傳統的定義) Structure learning (如漫畫獵人的黑暗大陸一樣,GAN如領路人帶我們走進這個新的領域) Generative Adversarial Networks (GAN) 一般對生成模型的說明,是以Ian Goodfellow最初論文中的「做假鈔與警察」的比喻。Generator就是做假鈔的人,要想辦法無中生有做出假鈔,而Discriminator就是警察,要想辦法在真鈔、假鈔間辨認出真假。做假鈔的人與警察在對抗中,兩者都會慢慢成長,最後假鈔會十分像真鈔,而警察的分辦能力也會很強。 原始GAN的主要缺陷 (Ian Goodfellow) 沒有 conditional-generation ( https://youtu.be/f1KUUz7v8g4?t=14m28s ) 訓練穩定性不好 (無法像CNN一樣在收斂後能有穩定結果) 跨架構 (architectures) 跨資料集 (datasets) 跨domains (time domain, frequency domain, …) 沒有好的評估方式(生成結果還是要藉由人來判斷好壞) GAN 用來生成資料如果不能產生新的分佈,不太有幫助 有趣的研究 最讓我印象深刻的是 nVidia 的 progressive GAN ,生成了以假亂真的真人照片 Karras, Tero, et al. “Progressive growing of gans for improved quality, stability, and variation.” arXiv p...